我对飞行的理解,速度的思考(低速)
各位,大千世界,各有不同。我这几年逐渐喜欢去思考事物的本质,想从不同的客观事物里找到一个中心抽象的概念和方法论去更好的把握事物发展的规律,好让自己追根溯源,更加清晰透彻的看世界。
我身边每个朋友的眼中都有一个不同的我,每个人对飞行本质的理解都不太一样。有人认为飞行的本质是situational awareness,是risk, task, threat management, 是single Pilot/ crew resource management,是flare 那一瞬,甚至是烧钱。这些看法其实没有对错,我也想来分享一下我肤浅的理解。(本人文化程度不高,只有高中毕业,漏洞错误一定有,各位凑活着看,请勘误)
一,
Flying an airplane is flying an airplane,不管是小到152,大到747-800,在飞机”飞” operate 的过程中是一样的。想爬就拉,拉多了,反而爬不动,掉高度。(这里不讨论在操纵之外应该注意的比如pre flight planing,human factor 以及航线运输过程中额外的点)。那么就固定翼“飞行”本身而言,我认为“玩”的就是一个速度,速度玩的好,飞行至少不会出问题。
关于速度的原理
飞机产生升力的surface 是Aerodynamic的,那这里就包含了aero 和dynamic。只有Air,再轻的飞机,相对于空气不动,你把yoke 拉到底,拉到你肚子里,它都飞不起来。但是如果让air 相对的动起来,再通过改变一点抬头的角度,那么多重的飞机都可以轻松地在跑道上飞起来。
这里我先粗浅的引入一点飞行原理,下面可以看到升力公式以及升力系数和Angle of attack 的关系图。
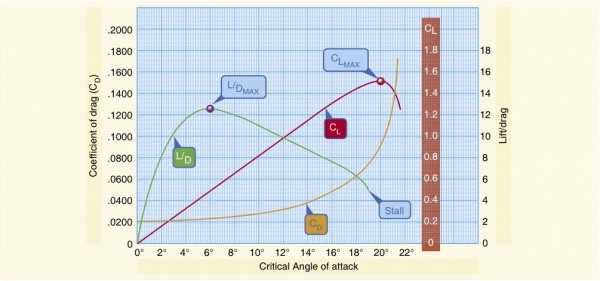
在产生lift 的过程中,可以看到其实飞行员大致可以快速改变的就是一个Coefficient of lift 和Velocity。通过改变angle of attack (AoA)来改变升力系数Coefficient of lift,和通过油门来改变velocity(当然大部分时间不考虑利用掉高度去换速度)
利用油门控制速度很好理解,和车一样,给油就走。可是固定翼飞机不同的就是利用了机翼的一个和空气的角度,叫Angle of attack。那什么是Angle of Attack 呢,就是机翼横剖面最前端的点到最尾端的点连成的直线,弦线(Chord Line)对于空气相对来流(relative wind)的攻角。机翼在安装在飞机身体的过程中,这个角度并不是完全水平的,会有一定的预设角度,但是为了简化这个概念,我们可以把这个弦线的攻角Angle of attack 理解为机头对于空气来流的角度,也就是飞机俯仰的高低。飞行员通过改变操纵杆的前后改变elevator 来改变这个AOA 的大小。
这里注意到CL并不是一直会不停的随着AOA的增长而增长,而是在增长到一定的高度之后开始下降。这其实也就是固定翼飞行器利用压力差产生升力的一个不可避免的问题。出来混的,迟早是要还的。世间万物都会自我平衡,气压也是如此,高压会本能的走向低压去平衡二者。机翼在利用压力差,上表面低压产生升力的同时,随着和周围的空气压力差越来越大,部分周围的空气会逐渐从机翼后部进入低压区域,当这个现象发生的时候就是上表面气流的分离,也就是没有之前那么大的压力差随后升力的产生就会出现问题,所以CL 降低了。所以为了产生升力让飞机飞起来,通过改变AOA来改变CL是一个办法,但是CL的改变是有限的,有一个顶点(critical angle of attack ),能改变的只能在critical aoa 前面,而理解到这个顶点就是理解固定翼飞行的关键!
第二个变量就是速度,仔细看公式可以看到,一个速度的变化量通过先平方,再除以二的形式会导致四个升力的变化量,所以这个速度的改变更有效率的改变了升力。所以这个速度是飞行的充分必要条件。并且在飞行过程中速度改变的范围是巨大的,基本上可以从0一直变到速度表的尽头.
那么下一个问题就是怎么样把Angle of attack 和速度结合起来。就像我之前说的,随着空气来流本身角度的变化,飞机很难准确的给出一个AoA的值,但是我们对AoA又是非常关心的。所以大部分时候,在1G的飞行下,人们习惯用速度来表示AoA的大小。
其实也很好理解,当飞机爬升时,AoA角度大了,所以在油门不变的情况下,速度就会变小。反之亦然。这样就可以用速度大概来代指飞机仰角的大小。机翼只有在超过critical angle of attack 的情况下才会stall。所以也就是为什么POH 上会给stall speed,但是一定要明白的是是这些stall speed 都是在1G情况下,机翼的AoA超过critical angle of attack 时候,飞机的速度。
那如果机翼本身已经有一定的angle of attack 在支持一个有bank angle 的情况,比如Cessna 172 同样90kts. 的水平飞行(no change in altitude ),一个有30度bank ,一个直飞。
在转弯的机翼因为要产生同样的升力,已经有了一些角度,那么它离临界角度就更近了一些,那么同样90节的速度,飞直线的飞机可能到37节的时候,angle of attack 才超过Critial,而30度压弯的,可能抬头到45节的时候,机翼的angle of attack 就已经超过了critical,那么它在45节就会stall,这也就是为什么stall 可能会发生在任何高度,任何速度。要正确理解POH的速度。所以在低速过程中,尤其是在back side of power curve 的时候,对速度的掌控至关重要。
这里就要简单插入另一个话题,什么是back side of power curve and reverse command.
控制速度在大多数阶段的日常飞行中都非常简单,想快给油,想慢收油,和开车差不多。但是飞机在产生升力的同时也会产生阻力,这里就是induced drag。飞机在减速的过程中,由于需要保持高度,所以升力不变的情况下,当速度减小时,CL就需要变大,那么在上文中提到就需要增加angle of attack. 但是当机翼的角度增加时,机翼的纵截面面积就会增加,产生很多阻力。就比如在开车时,把手伸出去,手掌向下基本上等于aoa 为0,在手掌逐渐往前旋转的过程中,阻力也增加了。有一部分阻力的竖直方向上的分力可以考虑成升力,但总体还是向运动反方向的阻力多。
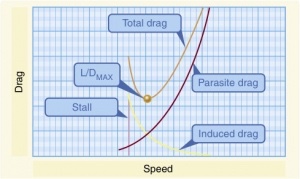
所以在有一个aoa 点是阻力和升力的break even point. 那这个点对于阻力来说,看阻力图就可以看到,之前是induced drag 大,之后是parasite drag 大。这个阻力最低的点也就是没有动力时候飞机阻力最小的angle of attack。如果换算成1G情况下,就是Best glide speed.
如果再把动力曲线加在图上,
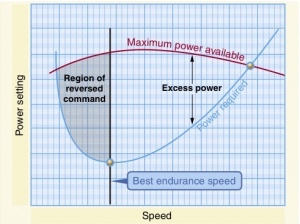
阴影部分的一半是速度小于best glide speed,一半是速度大于best glide speed。大部分时间我们都会把飞机飞在速度大于best glide speed,但是在速度小于best glide speed 的情况下,就是back side of power curve,也就是reverse command,如果需要爬升,在阻力已经非常大,并且没有多少excess thrust 的情况下反而需要先低头,re configure。并不能再拉杆了,不然会stall. 有一点反常理,但是必须想通。所以看到在低速阶段对速度的掌握和高速是不同的,也是飞行有意思的地方。
第三个我想说的就是Trim 配平,这个也是一个固定翼飞行器才有的一个独立的东西。这个配平的本质是一个在elevator 上的一部分或者整个stabilator 在飞机飞行中,以一个反相向的角度的升力让空气固定住elevator,减轻手上持续施加在操纵杆的力。那么这个Trim tab,的终极目标是什么呢?就是trim tab 停住一瞬间的角度飞机的速度。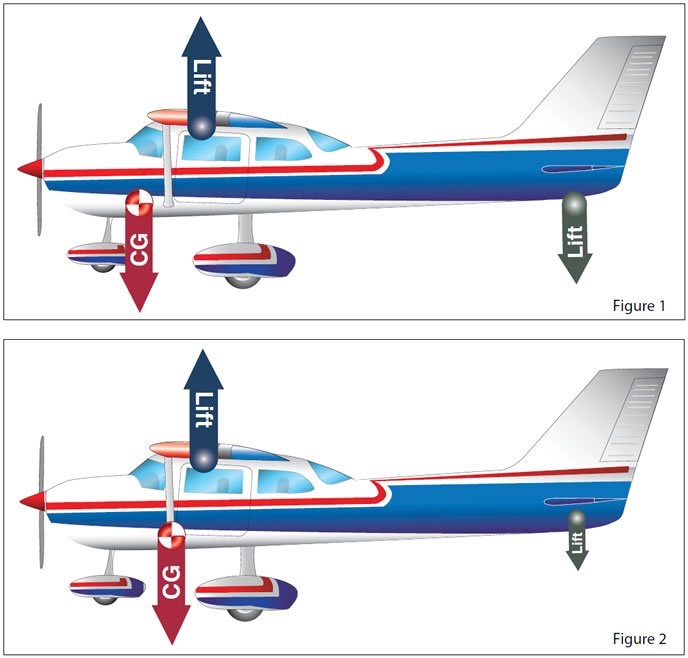
试想一下,如果飞机现在90节straight and level flight. 飞行员不小心trim 往后多了一下(比如trim 到了80节应有的角度),油门不变的情况下,手如果不碰yoke/stick,飞机会慢慢抬头爬升,用高度换速度,然后再低头找自己trimmed 80kts,掉了一定高度,速度变大之后,又爬升,因为positive stability 的设计,经历了一系列的oscillation 之后逐渐稳定在一个以80节的速度的straight and level flight.
那么这个是我们不想要的,我们想要的就是90节,直接trim 到straight and level。理解了trim for speed 以后就好做了,飞机到了自己理想的速度和高度。通过控制变量法,控制的手先把握好attitude不变,这样的AoA就不变了,第二步,收油门,让速度不变。这样理论上在同一份空气里,升力是不会变的,燃料的消耗暂且忽略不计。最后在一切都满意的时候再进行针对这个速度的trim. 先粗略地放在位置,控制飞机的手不变的情况下,另一个手去找控制飞机手不需要力的感觉。但是就像我说的,燃料一直减少,空气的密度一直变化,时不时的需要微调。最重要的就是速度变了就需要重新调整。所以飞行的各个阶段玩的就是一个速度。
以上就是我对低速飞行的粗浅理解,下次有机会再结合最近几年飞航线再聊一下高空亚音速下,和swipe back wing 对速度的掌握
|
主题数 5 |
帖子数 1 |
注册排名 55 |